AI-Powered Robot Successfully Navigates International Space Station Using Machine Learning
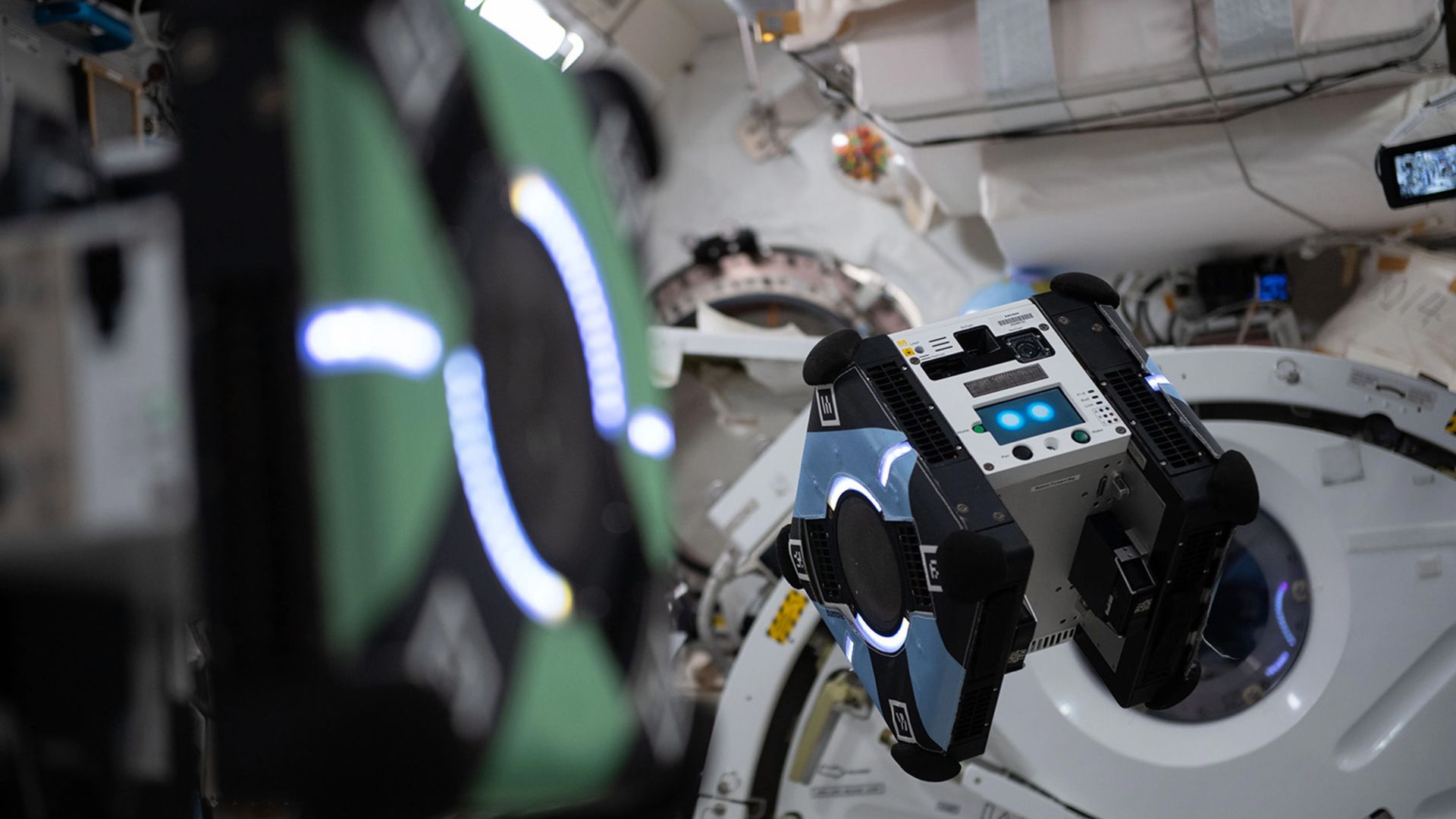
In a groundbreaking achievement, researchers from Stanford University have successfully utilized artificial intelligence to navigate a free-flying robot around the International Space Station (ISS). This pioneering feat marks a significant milestone in the development of autonomous space missions. The Stanford research team, led by Ph. D. candidate Somrita Banerjee, collaborated with NASA’s cube-shaped Astrobee robot to demonstrate the capabilities of a machine-learning system in planning safe routes through the ISS’ densely populated modules.
The team’s innovative approach addressed a long-standing challenge in space robotics: moving quickly and safely with limited computing power and minimal human input in one of the most extreme engineering environments. The ISS, with its maze of equipment and experiments, poses a considerable challenge for motion planning.
Algorithms that work well for robots on Earth often falter when run on the older, radiation-hardened computers certified for spaceflight. To overcome these constraints, Banerjee and her colleagues employed a standard optimization approach, breaking down complex motion-planning problems into smaller steps. The researchers then trained an AI model on thousands of previously computed paths, enabling the system to begin each new plan with an informed “warm start” instead of calculating from scratch.
This approach allows for strict safety checks before runs while reducing actual computation time.
Navigating in a microgravity environment is a challenge even for trained human astronauts, but it is even more challenging for autonomous robots, …
Looking to read more like this: Check here
 Approved by the Army of the Alien Monkeys
Approved by the Army of the Alien Monkeys